

Το λογισμικό ανοιχτού κώδικα δεν αλλάζει μόνο τον τρόπο που αλληλεπιδρούμε με τον κόσμο, αλλάζει και τον τρόπο που ο κόσμος αλληλεπιδρά πίσω μαζί μας. Τα ρομπότ παίζουν όλο και μεγαλύτερο ρόλο στον κόσμο μας, και ενώ ίσως να μην έχει φθάσει το ουτοπικό μέλλον με ρομπότ ως οικιακούς καθαριστές όπως στους Jetsons, η ρομποτική κάνει προόδους σε τομείς που πριν από πενήντα χρόνια θα ήταν εντελώς αδιανόητες.

Ενώ αναμφισβήτητα οι γραμμές παραγωγής στα εργοστάσια υπήρξα είχαν το μεγαλύτερο μερίδιο στην χρήση ρομποτικής, σήμερα όλο και περισσότερο τα ρομπότ γίνονται μέρος της καθημερινότητας μας. Πολλοί από εμάς έχουμε ρομπότ που καθαρίζουν τα πατώματα μας, καθαρίζουν τις υδρορροές μας, θερίζουν το γκαζόν μας, και πολλά άλλα. Και τώρα, με την πρόοδο των αυτοκινήτων χωρίς οδηγούς, των drones, και τις άλλες τεχνολογίες μεταφορών, η γραμμή μεταξύ του τι είναι ένα ρομπότ και τι είναι ένα όχημα είναι πια δυσδιάκριτη.
Αλλά ας είμαστε ειλικρινείς: πολλοί από εμάς έχουν ένα ενδιαφέρον για τη ρομποτική απλά επειδή είναι διασκεδαστική! Και τα καλά νέα είναι ότι δεν χρειάζεται να είναι κάποιος ηλεκτρολόγος μηχανικός για να απολαύσει την ρομποτική ως χόμπι. Ευτυχώς, υπάρχουν μια σειρά από έργα ανοικτού κώδικα εκεί έξω που μπορούν να βοηθήσουν ακόμα και τους πιο αρχάριους.
Open Source Hardware
Ένα ρομπότ είναι ένα φυσικό πράγμα, και, ως εκ τούτου, τόσο ο κώδικας όσο και το υλικό του υπόκεινται σε αδειοδότηση. Ευτυχώς, υπάρχουν μια σειρά από ανοιχτές πλατφόρμες hardware για να ξεκινήσετε με τη ρομποτική.
 Sparki. Το Sparki είναι μια ολοκληρωμένη πλατφόρμα ρομποτικής ανοικτού κώδικα . Οι σχηματικές παραστάσεις, τα αρχεία 3D , και ο πηγαίος κώδικας είναι όλα ανοικτού κώδικα. Σχεδιασμένο για να είναι ένα προσιτό εισαγωγικό ρομπότ για και μαθητές δημοτικού και για ενήλικες , το Sparki έρχεται με έναν αισθητήρα απόστασης, επιταχυνσιόμετρο, υπέρυθρες επικοινωνίες, πυξίδα, αισθητήρα φωτός και πολλά άλλα. Ενώ ο Sparki έρχεται με ρόδες, υπάρχει και μια ξαδέρφη του με πόδια ονομάζεται Hexy η Hexapod, μια παρόμοια πλατφόρμα ανοικτού κώδικα.
Sparki. Το Sparki είναι μια ολοκληρωμένη πλατφόρμα ρομποτικής ανοικτού κώδικα . Οι σχηματικές παραστάσεις, τα αρχεία 3D , και ο πηγαίος κώδικας είναι όλα ανοικτού κώδικα. Σχεδιασμένο για να είναι ένα προσιτό εισαγωγικό ρομπότ για και μαθητές δημοτικού και για ενήλικες , το Sparki έρχεται με έναν αισθητήρα απόστασης, επιταχυνσιόμετρο, υπέρυθρες επικοινωνίες, πυξίδα, αισθητήρα φωτός και πολλά άλλα. Ενώ ο Sparki έρχεται με ρόδες, υπάρχει και μια ξαδέρφη του με πόδια ονομάζεται Hexy η Hexapod, μια παρόμοια πλατφόρμα ανοικτού κώδικα.
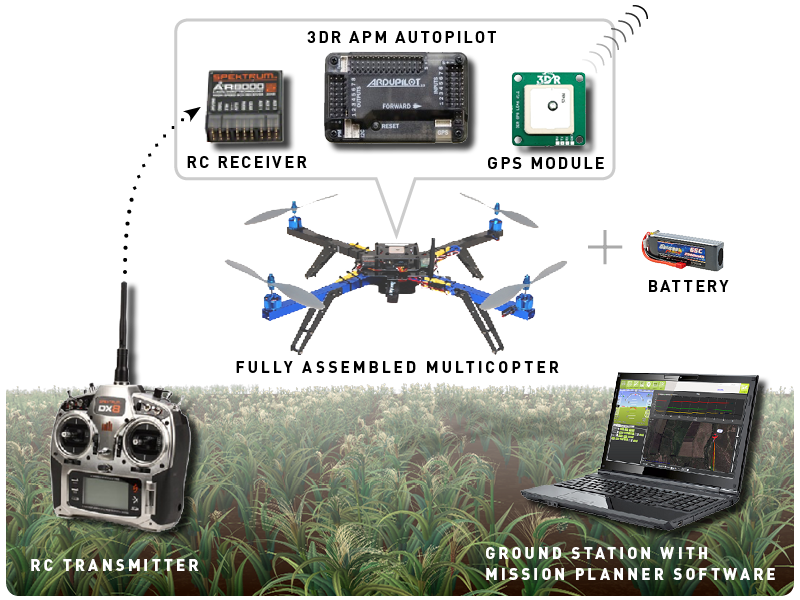 Τα ρομπότ δεν περπατάνε πάντα. Μερικές φορές, πετάνε. Ένας αριθμός σημαντικός αριθμός drones ανοιχτού κώδικα βασίζονται στα συστήματα OpenPilot ή Ardupilot. Το ArduPilot Copter, για παράδειγμα, μπορεί να συναρμολογηθεί ως ένα ελικόπτερο, quadcopter, ή μια ποικιλία από άλλες διαμορφώσεις, τόσο ως DYI όσο και σε κιτ και εξαρτήματα από έναν αριθμό κατασκευαστών.
Τα ρομπότ δεν περπατάνε πάντα. Μερικές φορές, πετάνε. Ένας αριθμός σημαντικός αριθμός drones ανοιχτού κώδικα βασίζονται στα συστήματα OpenPilot ή Ardupilot. Το ArduPilot Copter, για παράδειγμα, μπορεί να συναρμολογηθεί ως ένα ελικόπτερο, quadcopter, ή μια ποικιλία από άλλες διαμορφώσεις, τόσο ως DYI όσο και σε κιτ και εξαρτήματα από έναν αριθμό κατασκευαστών.
![]() Το TurtleBot είναι μια άλλη πλατφόρμα ρομπότ, που διατίθεται τόσο ως ένα κιτ από διάφορους κατασκευαστές, καθώς και μια σειρά από εντελώς ανοιχτών οδηγιών που σας επιτρέπουν να δημιουργήσετε το δικό σας ρομπότ από κομμάτια συμπεριλαμβανομένων ενός υπολογιστή netbook, ενός Kinect, και του Kobuki
Το TurtleBot είναι μια άλλη πλατφόρμα ρομπότ, που διατίθεται τόσο ως ένα κιτ από διάφορους κατασκευαστές, καθώς και μια σειρά από εντελώς ανοιχτών οδηγιών που σας επιτρέπουν να δημιουργήσετε το δικό σας ρομπότ από κομμάτια συμπεριλαμβανομένων ενός υπολογιστή netbook, ενός Kinect, και του Kobuki
Software
Ένα ρομπότ είναι κάτι περισσότερο από απλά μεταλλικά κομμάτια του. Χρειάζεται κάποια μορφή νοημοσύνης για να είναι σε θέση να εξυπηρετήσει τον κύριό του, είτε με άμεσες εντολές ή με ορισμένες, τουλάχιστον στοιχειώδεις δικές του αποφάσεις. Εδώ είναι μερικά ενδιαφέροντα έργα ανοικτού κώδικα από την πλευρά του λογισμικού της ρομποτικής.
LeJOS. Το LeJOS είναι ένα καλό ρομποτικό έργο λογισμικού για αρχάριους για να γνωρίσουν την ρομποτική από κοντά. Είναι ουσιαστικά μια αντικατάσταση για το firmware που έρχεται με το Lego Mindstorms, επιτρέποντας το χρησιμοποιείται για τον προγραμματισμό των Mindstorms γλώσσα προγραμματισμού Java.
Το Rock, (Robot Construction Kit) είναι ένα framework λογισμικού για την ρομποτική, που βασίζεται στο Orocos RTT (Real Time Toolkit). Το Rock έχει σχεδιαστεί για να είναι επεκτάσιμο και περιλαμβάνει μια σειρά από οδηγούς για τις υφιστάμενες εφαρμογές.
Το ROS (Robot Operating System) είναι ένα framework για τη σύνταξη λογισμικού για τα ρομπότ, που περιλαμβάνει διάφορα εργαλεία και βιβλιοθήκες για την απλοποίηση της διαδικασίας. Είναι σχεδιασμένο για τη συνεργατική ανάπτυξη, με αρθρωτά εξαρτήματα και παγκόσμια κοινότητα. To ROS διανέμεται με άδεια BSD και χρηματοδοτείται από το Open Source Robotics Foundation.
Προσομοιωτές ρομπότ
Πρι να αρχίσετε την συναρμολόγηση υλικού, θα πρέπει να έχετε ένα σχέδιο δράσης. Τα ρομπότ λειτουργούν στον πραγματικό κόσμο υπόκεινται σε φυσικούς περιορισμούς όπως η βαρύτητα, το έδαφος ή οι καιρικές συνθήκες. Επειδή ένα σχέδιο φαίνεται καλό στα χαρτιά, αυτό δεν σημαίνει ότι θα λειτουργήσει στην πραγματικότητα. Γιατί λοιπόν να μην προσομοιώσετε τη λειτουργία του ρομπότ σας πριν ξεκινήσετε;
Gazebo. Το Gazebo είναι μια ολοκληρωμένη λύση προσομοίωσης με άδεια Apache , με προηγμένα 3D γραφικά, εικονικούς αισθητήρες, μια εκτεταμένη γραμμή εντολών και συλλογή εργαλείων, και την ικανότητα να τρέχει τις προσομοιώσεις σας σε cloud. Υποστηρίζει πολλά plugins και έρχεται με διάφορες πλατφόρμες ρομπότ για να μπορείτε να ξεκινήσετε την μοντελοποίηση σας.
Το MORSE, (Modular OpenRobots Simulation Engine) είναι ένα έργο με άδεια BSD που επικεντρώνεται στην προσομοίωση ακαδημαϊκών ρομπότ, είτε σε εσωτερικούς ή εξωτερικούς χώρους. Το MORSE μπορεί να προγραμματιστεί με Python και μοντελοποιείται μέσω του Blender
Η V-REP είναι μια “εικονική πλατφόρμα ρομπότ πειραματισμού” με άδεια GPL, η οποία λειτουργεί σε Windows, Mac και Linux, υποστηρίζει πολλαπλές προσεγγίσεις προγραμματισμού και γλώσσες, και μπορεί να προσομοιώσει τόσο προηγμένες φυσικές καταστάσεις καθώς και τα δεδομένα από τους αισθητήρες εγγύτητας και της όρασης.
Φυσικά, τα παραπάνω δεν είναι μόνο έργα ανοικτού κώδικα για τους λάτρεις των ρομπότ εκεί έξω. Υπάρχουν πολλά περισσότερα που αξίζουν να τους ρίξουμε μια ματιά. Επιπρόσθετα, με την έλευση του Raspberry Pi και του Arduino, είναι ευκολότερο από ποτέ να ξεκινήσουμε από το μηδέν και να οικοδομήσουμε τη δική μας δημιουργία.
Πηγή άρθρου: https://opensource.com