

Το σχολικό έτος 2019-20 ο Πανελλήνιος Διαγωνισμός Ανοιχτών Τεχνολογιών στην Εκπαίδευση, επικεντρώθηκε στην Κλιματική Αλλαγή και 243 ομάδες μαθητών από σχολεία όλης της Ελλάδας υπέβαλαν επιτυχημένες προτάσεις έργων ανοιχτών τεχνολογιών που συμβάλλουν στην αντιμετώπιση της κλιματικής κρίσης.
Λόγω της πρωτόγνωρης κατάστασης την οποία όλοι βιώνουμε λόγω του κορονοϊού, η οργανωτική επιτροπή του διαγωνισμού αποφάσισε τη παράταση της υποβολής των ολοκληρωμένων έργων Ανοιχτών Τεχνολογιών, έως και τις 15 Οκτωβρίου 2020.
Παρά τις αντίξοες συνθήκες αρκετές ομάδες ολοκλήρωσαν τα έργα τους, τα οποία παρουσιάζονται στο https://openedtech.ellak.gr/ .
E-HARVEST – Ευφυής Συγκομιδή -Εσπερινό ΕΠΑΛ ΕυόσμουΟ
Έργο για τη συμμετοχή στον 2ο Πανελλήνιο Διαγωνισμό Ανοιχτών Τεχνολογιών
ΓΕΝΙΚΑ

Η ολοκληρωμένη διαχείριση μιας αγροτικής δραστηριότητας με την αξιοποίηση των σύγχρονων τεχνολογιών αποτελεί τα τελευταία χρόνια αντικείμενο ερευνών και μελέτης τόσο σε επιστημονικό επίπεδο όσο και από την πλευρά ιδιωτικών εταιριών. Ο στόχος είναι η καλύτερη αγροτική εκμετάλλευση, με πολλαπλά οφέλη για τους αγρότες, την παραγωγή αλλά ταυτόχρονα και την προστασία του περιβάλλοντος. Είναι μια καινοτόμα κατασκευή με στόχο τη βελτίωση της συγκομιδής γεωργικών – αγροτικών προϊόντων.
Η κατασκευή μας στηρίζεται ακριβώς σε αυτή την ιδέα. Αποτελείται από ένα αυτοκινούμενο όχημα που μεταφέρει 1 καλάθι συγκομιδής. Το όχημα ακολουθεί μια συγκεκριμένη πορεία, πηγαίνοντας στο σημείο όπου βρίσκετε ο αγρότης που μαζεύει την παραγωγή του. Όταν το καλάθι γεμίσει, το όχημα πηγαίνει στο σημείο εκφόρτωσης όπου ένας ρομποτικός μηχανισμός αδειάζει το φορτίο. Στη συνέχεια φορτώνει ένα άδειο καλάθι στο όχημα και αυτό επιστρέφει στον αγρότη. Ο αγρότης μπορεί και ελέγχει το όχημα μέσα από κουμπιά. Η κίνηση του οχήματος γίνεται με 2 κινητήρες που ελέγχονται από ένα Arduino Uno.
ΑΝΑΛΥΤΙΚΑ
Αυτοκινούμενο όχημα


Είναι ένα ερπυστριοφόρο όχημα που μετακινείται αυτόνομα. Ο στόχος του είναι να μεταφέρει ένα καλάθι για συλλογή καρπών σε έναν αγρότη.
Η λειτουργία του οχήματος γίνεται ως εξής:με το πάτημα ενός πλήκτρου το όχημα ακολουθεί μια συγκεκριμένη διαδρομήμε τη χρήση ενός αισθητήρα υπερήχων. Ο αισθητήρας του επιτρέπει να διατηρεί ορισμένη και συγκεκριμένη απόσταση από ένα αντικείμενο που έχει τοποθετηθεί ως οδηγός π.χ. ταινιο-λωρίδα.
Το όχημα σταματάει όταν συναντήσει τον αγρότη στο τέλος της διαδρομής. Ο τρόπος με τον οπόιο σταμάτημα είναι με ένα αισθητήριο υπερύθρων.
Στη συνέχεια ο αγρότης το απενεργοποιεί πατόντας πατώντας ένα κουμπί. Όταν φορτωθεί το καλάθι, ο αγρότης με ένα άλλο κουμπί, στέλνει το ερπυστριοφόρο όχημα στην βάση για να γίνει η εκφόρτωση του καλαθιού. Δυστυχώς λόγω περιορισμένου χρόνου δεν προστέθηκε το σταμάτημα και το ξεκίνημα με διακόπτη στον κώδικα του οχήματος.Η λειτουργία του φαίνεται στο παρακάτω video


Ρομποτικός μηχανισμός εκφόρτωσης
Ο μηχανισμός εκφόρτωσης είναι ένα ρομποτικό σύστημα που εκφορτώνει από το όχημα το γεμάτο από προϊόντα καλάθι και το μεταφέρει ένα σημείο συλλογής.
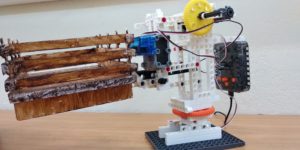
Όταν το όχημα βρεθεί στο σημείο εκφόρτωσης, εντοπίζεται από έναν αισθητήρα υπερύθρων και δίνεται η εντολή σε ένα βραχίονα να εκταθεί και σηκώσει το καλάθι. Στη συνέχεια ο βραχίονας στρίβει και τοποθετεί το καλάθι στο σημείο μεταφόρτωσης. Κατόπιν περιστρέφεται 180ο και φορτώνει ένα άδειο καλάθι και το μεταφέρει στο όχημα.
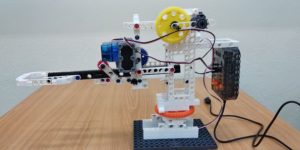
Τέλος επανέρχεται στην αρχική του θέση. Ο τρόπος λειτουργίας φαίνεται στο παρακάτω video: https://youtu.be/Tz2XzBE4bI4

Η κατασκευή πραγματοποιήθηκε με τη χρήση του πακέτου Gigo S4A Programming Bricks. Το πακέτο αποτελείται από μια πλακέτα βασισμένη σε Arduino Leonardo.

Ο προγραμματισμός έγινε από την προγραμματιστική πλατφόρμα S4A (Scratch για Adruino). Περιέχει αισθητήρια και διάφορα δομικά υλικά για την κατασκευή διαφόρων ρομποτικών εφαρμογών. Το συγκεκριμένο πακέτο δόθηκε δωρεάν στο σχολείο από την WRO και την Διερευνητική Μάθηση.
Αποθετήριο github
Το project μας ολοκληρώθηκε εν μέρει. Δεν προλάβαμε να δοκιμάσουμε μαζί και τις δύο κατασκευές. Δυστυχώς ο χρόνος που είχαμε στη διάθεσή μας ήταν πολύ περιορισμένος. Στο αποθετήριο μας στο github, https://github.com/beearduino/E-HARVEST, θα βρείτε περισσότερες πληροφορίες για τους κώδικες των δύο κατασκευών, καθώς και φωτογραφίες από τα διάφορα στάδια κατασκευής.
Υλικά
- Eρπυστριοφόρο όχημα
- Arduino Uno
- Αισθητήρες Υπερήχων HC-SR04
- Obstacle avoidance Sensor Infra Red KY-032
- L298N Dual H-Bridge Motor Driver
- GIGO S4A programming Bricks
- led blue
- Μπαταρίες 9V
- Μακετόχαρτο
- Χρώματα
Συμμετέχοντες μαθητές
- Αγοραστούδης Θωμάς
- Βαρσάμης Νικόλαος
- Θεοφανίδης Αντώνης
- Κύριος Νικόλαος
- Πασχαλίδης Νικόλαος
- Σαμουρέλης Χρήστος
- Σιώπης Ιωάννης
- Τσουφλίδης Λεωνίδας
- Φράγκος Θωμάς
Υπεύθυνη Εκπαιδευτικός
Τσαβέλη Δάφνη, ΠΕ84