

Στα πλαίσια του Google Summer of Code 2019 ο Χρήστος Χρόνης, προπτυχιακός φοιτητής του Χαροκόπειου Πανεπιστημίου στο τμήμα Πληροφορικής και Τηλεματικής, ανέλαβε την ανάπτυξη ενός DIY ρομποτικού κίτ για εκπαιδευτικούς.
Στόχος του έργο ήταν η δημιουργία ενός ρομποτικού κιτ όπου θα μπορεί ο οποιοσδήποτε με ελάχιστες έως και καθόλου γνώσεις μηχανικής, ηλεκτρονικής και προγραμματισμού να το χρησιμοποιήσει. Επίσης άλλος ένας στόχος ήταν να δοθεί η δυνατότητα να αξιοποιηθεί από την εκπαιδευτική κοινότητα ή να αποτελέσει πιθανή open source εναλλακτική πρόταση απέναντι στα εμπορικά κιτ ρομποτικής. Από τις βασικές προϋποθέσεις του έργου ήταν η εύκολη συναρμολόγηση του ρομπότ, η ελαχιστοποίηση της χρήσης εργαλείων, ο φιλικός και εύκολος προγραμματισμός, οι αναλυτικές οδηγίες χρήσης και συναρμολόγησης, το εκπαιδευτικό υλικό και τα παραδείγματα χρήσης καθώς και ένα βασικό κριτήριο επιλογής ,η οικονομική άνευ περιορισμών απόκτησή του .
Trailer του έργου (https://www.youtube.com/watch?v=83zVe_P6pcM)
Αρχικά το έργο ξεκίνησε με την επιλογή των ηλεκτρονικών εξαρτημάτων τα οποία θα έπρεπε να είναι χαμηλού κόστους και να μπορεί εύκολα κανείς να τα προμηθευτή από οποιοδήποτε σχετικό κατάστημα . Τα ηλεκτρονικά εξαρτήματα που επιλέχθηκαν καλύπτουν ένα μεγάλο εύρος δυνατοτήτων, από απλές λειτουργίες όπως μέτρησης απόστασης ή αποφυγής εμποδίων μέχρι και προηγμένες δυνατότητες όπως αναγνώριση προσώπων.
Όλα τα μέρη του ρομπότ σχεδιάστηκαν εξαρχής με βασική προϋπόθεση την ύπαρξη 3D εκτυπωτή και με στόχο την μεγιστοποίηση της λειτουργικότητας, την προστασία των ηλεκτρονικών εξαρτημάτων αλλά και την σταθερή και εύκολη συναρμολόγηση. Στα πλαίσια της εύκολης και σταθερής συναρμολόγησης αναπτύχθηκε ένα σύστημα με κουμπώματα και κλιπς. Το βασικό πλεονέκτημα της δυνατότητας των κομματιών να εκτυπώνονται είναι το χαμηλό κόστος κατασκευής του ρομπότ αλλά ταυτόχρονα και το χαμηλό κόστος αντικατάστασης φθαρμένων κομματιών .


6050



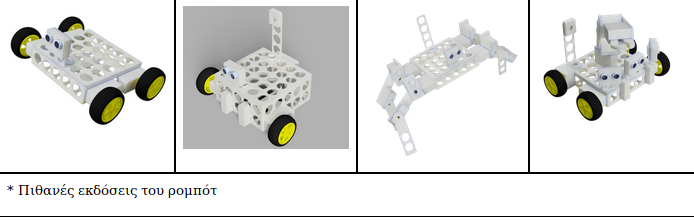
Ο σχεδιασμός με τα κουμπώματα και τα αποσπώμενα κομμάτια προσφέρει στον χρήστη μεγάλη ευελιξία καθώς κάθε φόρα μπορεί επιλέγει την τελική μορφή του ρομπότ σύμφωνα με τις απαιτήσεις του.
Η αρχική εγκατάσταση του λογισμικού του ρομπότ δεν θα μπορούσε να είναι πιο απλή, καθώς το μόνο που έχει να κάνει ο χρήστης είναι κατεβάσει την τροποποιημένη έκδοση του Raspbian να την γράψει σε μια micro-sd και είναι έτοιμος να ξεκινήσει. Για τον προγραμματισμό του ρομπότ αναπτύχθηκε η βιβλιοθήκη proteas_lib() η οποία μέσα από ένα αντικειμενοστραφή μοντέλο προγραμματισμού προσφέρει στον χρήστη την δυνατότητα να χρησιμοποιεί εύκολες και κατανοητές εντολες που εύκολα μπορούν να συνδυαστούν και να κάνουν το ρομπότ να εκτελεί πολύπλοκες ρουτίνες. Το ρομπότ μετά την εκκίνησή του δημιουργεί ένα ασύρματο σημείο πρόσβασης στο οποίο ο χρήστης συνδέεται με την χρήση οποιασδήποτε συσκευής με Wifi.
Ανοίγοντας τον περιηγητή του ο χρήστης μπορεί να συνδεθεί στην κεντρική σελίδα διαχείρισης του ρομπότ και να επιλέξει να το προγραμματίσει με την χρήση του Jupyter Notebook, να διαβάσει μια offline έκδοση του Wiki (https://github.com/eellak/gsoc2019-diyrobot/wiki) και να πραγματοποιήσει επανεκκινηση ή τον τερματισμο του (μελλοντικά θα προστεθούν περισσότερες επιλογές παραμετροποίησης).
Το Jupyter Notebook επιλέχθηκε σαν προγραμματιστικό περιβάλλον γιατί δίνει την δυνατότητα στον χρήστη να εκτελεί σε πραγματικό χρόνο τον κώδικα που γράφει αλλά και για το γεγονός ότι μπορεί να τον συνδυάσει τόσο με εμπλουτισμένο κείμενο όσο και με εικόνες.

Στο λογισμικό ο χρήστης έχει την δυνατότητα να βρει κάποια μαθήματα τα οποία συνδυάζουν την ρομποτική με άλλες επιστήμες όπως η φυσική ή τα μαθηματικά (STEM) ενώ αποτελούν παραδείγματα για το πως αυτό το κιτ μπορεί να χρησιμοποιηθεί αποτελεσματικά από τους εκπαιδευτικούς. Παράλληλα ο χρήστης θα βρεί παραδείγματα χρήσης των διάφορων ηλεκτρονικών εξαρτημάτων σύμφωνα με τα οποία θα μπορούσε να γράψει τα πρώτα του προγράμματα.


Το έργο αυτό ξεκίνησε από το μηδέν και για την εξέλιξη του χρειάζονται πολλά ακόμα βήματα, η βοήθεια και η εμπλοκή περισσότερων ανθρώπων είναι αναγκαία και ευπροσδεκτη αφού θα βοηθησει την κοινότητα στην διάδοση και στην βελτίωση αυτού του ανοικτού κιτ ρομποτικής.Τα σχέδια, ο κώδικας καθώς και λεπτομερείς οδηγίες είναι διαθέσιμες στο Github (https://github.com/eellak/gsoc2019-diyrobot).